ecoSUB C3 Graphical User Interface (GUI) softwareThis software is provided in support of ecoSUB Autonomous Underwater Vehicles and is designed to simplify the pre and post deployment testing, mission planning, data recovery, data storage, and vehicle recovery of ecoSUB AUVs. The software is intended for use only with ecoSUB AUVs and can be used with or without the ecoSUB “HERMES” Command, Control and Communications (C3) interface box.
A basic version of this software is provided free of charge to ecoSUB users, an enhanced version which allows operation with a larger number of AUVs, as well as some additional behaviors and facilities is available for purchase by ecoSUB users. |

|
- Pre-launch checks & diagnostics
- Offline maps & charts
- Mission planning & programming
- Real-time data viewing
- Recovery aid
Able to run on laptops and windows tablets, the ecoSUB C3 GUI, provides users with a suite of software tools to undertake comprehensive pre-launch vehicle checks and diagnostics, plan & launch missions, view ecoSUB data in near real-time and locate vehicles for recovery. The ecoSUB C3 GUI can work in conjunction with our HERMES C3 Command, Control & Communications system to provide a choice of communication channels and combinations to ensure that you stay in touch with your vehicles anywhere in the World
The ecoSUB GUI, is designed to allow users to operate ecoSUBs with the minimum of training and understanding of robotics. The system is extremely simple to use, intuitive and provides multiple functions in a single software package. Connection to ecoSUBs is made via a local WiFi network with data transfer via Wi-Fi, acoustics or Iridium. The ecoSUB C3 GUI basic version is provided free with all ecoSUBs; an optional enhanced version with additional features and behaviours is available. The ecoSUB C3 GUI works best when used in conjunction with the HERMES C3 system and the enhanced GUI is provided free to HERMES C3 users.
|
|

|

|
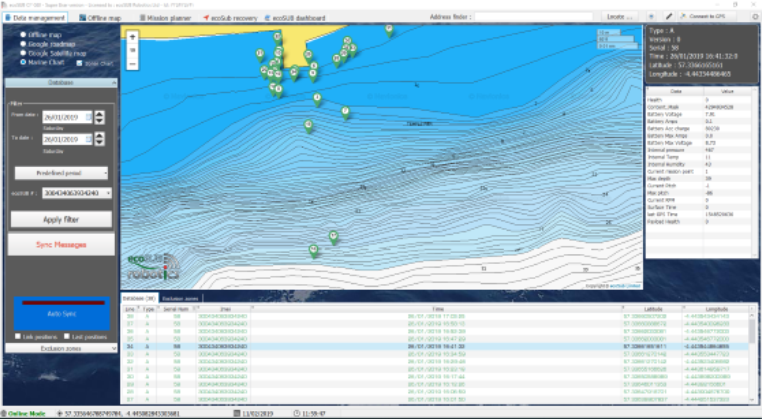
Data Management
Vehicle housekeeping data such as internal pressure, temperature, humidity, battery volts, power usage, location etc are sent via Iridium and stored within a data base on a secure server with multi level password protected access. Data from single or multiple vehicles can be viewed in real-time or historically
Offline maps
The system can use Google maps with an internet connection, or marine charts with or without internet connectivity. Users can select which charts to download for use offline to economise on local storage space
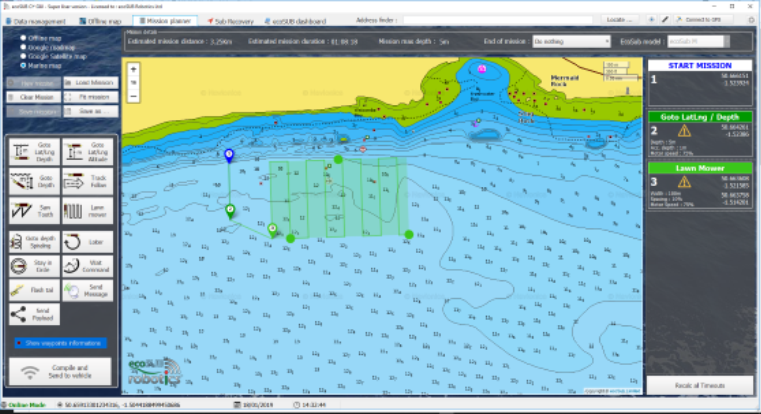
Mission planner
The mission planning feature allows users to drag an drop behaviours onto a map or chart, and adjust behaviour arguments without programming knowledge. Basic behaviours are provided as part of the free package. The enhanced paid for package provides access to additional behaviours and facilities Behaviours are sanity checked and overall mission criteria such as maximum depth, run time and distance are calculated as part of the planning
Recovery
This facility provides the user with navigation information and tools to assist piloting a recovery vessel to the location of the ecoSUBs last transmitted position. When run on a windows machine with internal or external GPS, users are presented with a simple to understand range and bearing to the vehicle which is updated in real-time
Dashboard
The ecoSUB dashboard provides users access to the sub systems of ecoSUB and shows graphically, information on the internal sensors, external payloads and manipulate the vehicles control systems including propeller, moving mass and rudder. This is used for pre-launch and post recovery testing and diagnostics
Vehicle housekeeping data such as internal pressure, temperature, humidity, battery volts, power usage, location etc are sent via Iridium and stored within a data base on a secure server with multi level password protected access. Data from single or multiple vehicles can be viewed in real-time or historically
Offline maps
The system can use Google maps with an internet connection, or marine charts with or without internet connectivity. Users can select which charts to download for use offline to economise on local storage space
Mission planner
The mission planning feature allows users to drag an drop behaviours onto a map or chart, and adjust behaviour arguments without programming knowledge. Basic behaviours are provided as part of the free package. The enhanced paid for package provides access to additional behaviours and facilities Behaviours are sanity checked and overall mission criteria such as maximum depth, run time and distance are calculated as part of the planning
Recovery
This facility provides the user with navigation information and tools to assist piloting a recovery vessel to the location of the ecoSUBs last transmitted position. When run on a windows machine with internal or external GPS, users are presented with a simple to understand range and bearing to the vehicle which is updated in real-time
Dashboard
The ecoSUB dashboard provides users access to the sub systems of ecoSUB and shows graphically, information on the internal sensors, external payloads and manipulate the vehicles control systems including propeller, moving mass and rudder. This is used for pre-launch and post recovery testing and diagnostics